MOTORES DC (CORRIENTE CONTINUA):
El motor DC es el que hace que tu teléfono vibre, haciendo girar un bloque de metal cuyo peso está distribuido de manera no uniforme.
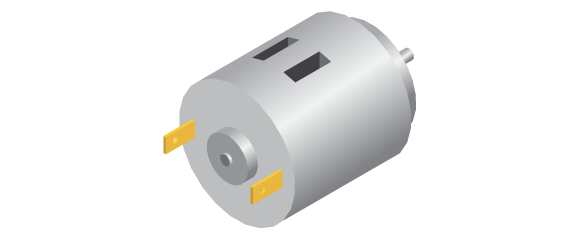
Un motor DC puede funcionar libremente en ambas direcciones, es muy fácil controlar su velocidad pero no su posición. Tampoco es sencillo hacerlo parar de forma precisa. Viene con dos cables: alimentación y tierra. Por regla general un motor DC no puede ser alimentado directamente de la corriente proporcionada por un pin digital de tu placa.
Los cables se pueden conectar a tierra o a un pin digital. Para hacerlo girar, pon el pin digital a nivel alto y para que se detenga, pon el pin digital a nivel bajo . Para hacerlo girar en sentido contrario, cambia el orden de los cables.
Es posible controlar la velocidad de un motor DC desde tu placa con una técnica llamada PWM usando un transistor. Con varios transistores dispuestos en un puente H, puedes incluso controlar la dirección sin tener que desconectar el motor.
MOTORES PASO A PASO:
Los motores paso a paso se pueden encontrar en cualquier objeto electrónico donde prima la precisión, como un escáner o una impresora. Un motor paso a paso puede, a diferencia del motor DC, ser muy preciso tanto en posición como en velocidad.
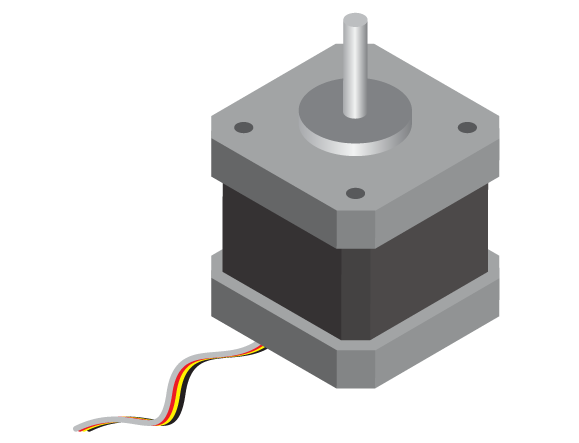
La rotación completa de los motores paso a paso se divide en pasos equitativos y puedes controlar la parada del motor en cada uno de estos pasos.
Cuanto más pequeños sean los pasos, más preciso será. Sin embargo, el motor paso a paso nunca será muy rápido
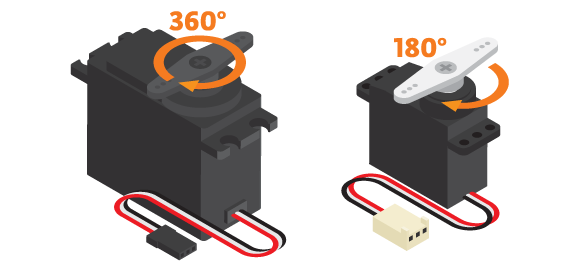
SERVOMOTORES
Los servomotores son ampliamente utilizados en robótica y en radio-control.Tienen tres cables: uno para la energía, uno para tierra y otro para controlarlos. Hay dos tipos de servomotores: rotación estándar y rotación continua. El estándar puede girar 180 grados y puede ser controlado como el motor paso a paso a una posición precisa. El de rotación continua puede, al igual que el motor DC, rotar en ambas direcciones, no tan rápido.

Comentarios
Publicar un comentario